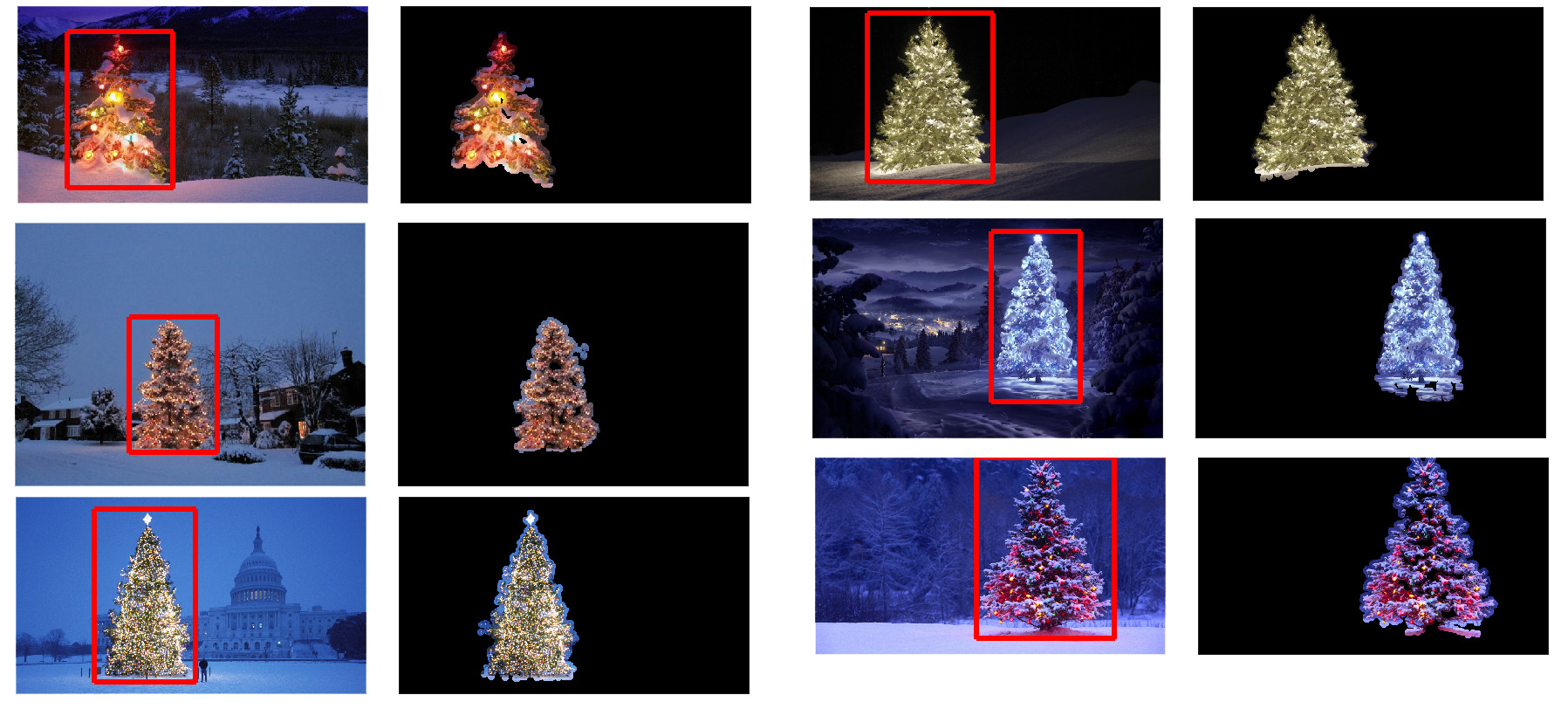
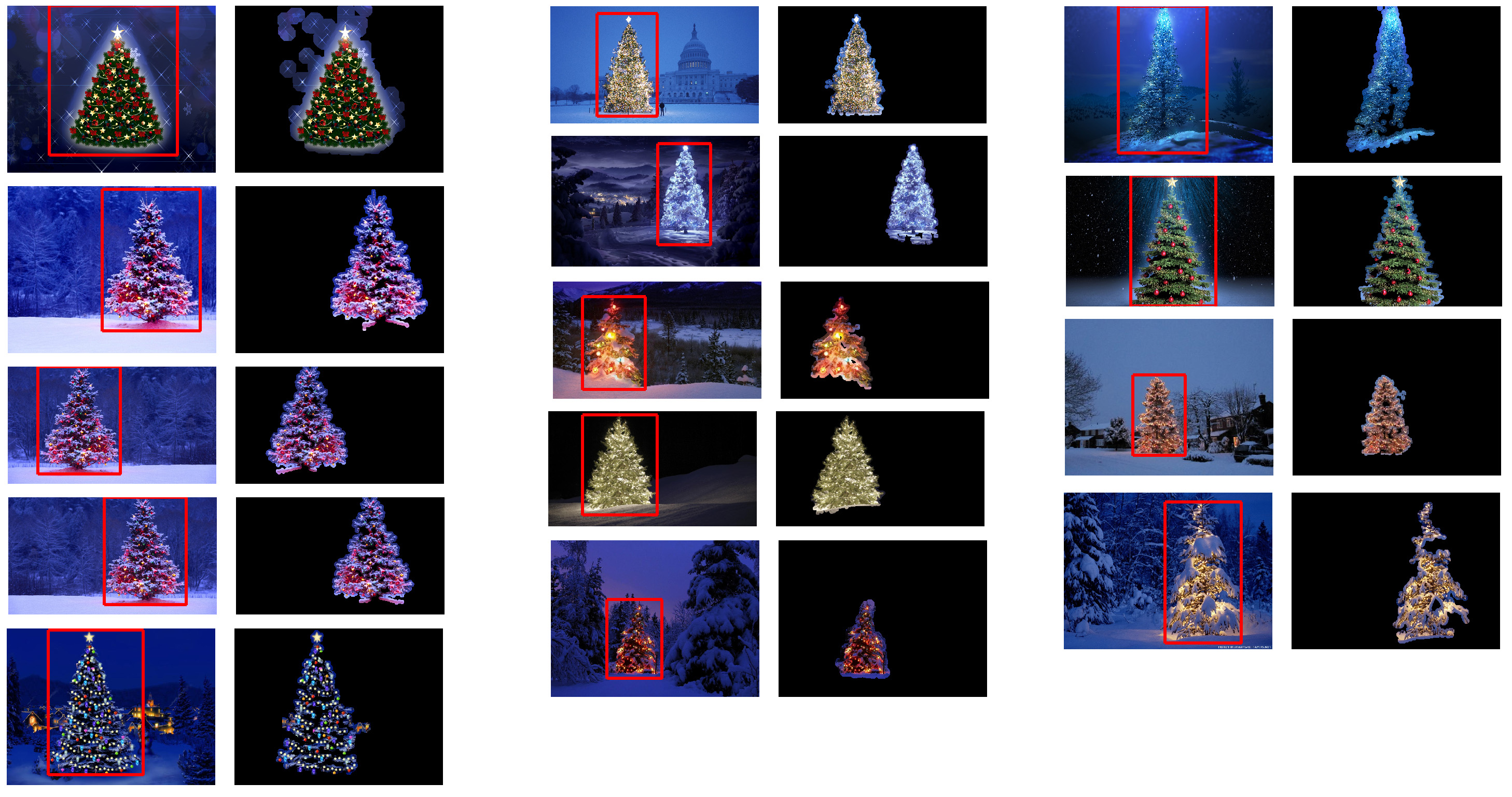
Какие методы обработки изображений могут использоваться для реализации приложения, которое обнаруживает рождественские деревья, отображаемые на следующих изображениях?






Я ищу решения, которые будут работать на всех этих изображениях. Поэтому подходы, требующие обучения каскадным классификаторам или сопоставлению шаблонов, не очень интересны.
Я ищу что-то, что может быть написано на любом языке программирования, если оно использует только технологии с открытым исходным кодом. Решение должно быть протестировано с изображениями, совместно используемыми по этому вопросу. Есть 6 входных изображений, и в ответе должны отображаться результаты обработки каждого из них. Наконец, для каждого выходного изображения должны быть красные линии, чтобы окружить обнаруженное дерево.
Как бы вы могли программно обнаружить деревья в этих изображениях?










































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}